
Helicopters are one of the most versatile modes of transportation in existence and give the pilot complete access to a fully 3-dimensional space. Because of this, helicopters, whether RC or full size, are one of the most difficult vehicles to learn to control.
For example:
- A train can travel in 2 directions: forwards and backward.
- A car can travel in 4 directions: forwards, backward, left and right.
- An airplane can travel in 5 directions: forwards, left, right, up and down.
Whereas a helicopter can travel in 6 directions: forwards, backward, left, right, up and down. Plus it can also rotate 360 degrees in either direction and do all of that while inverted.
In a traditional full-size helicopter, the pilot is facing forwards controlling the cyclic with one hand and the collective with the other.
However, in an RC helicopter, you’re not always looking the same way the helicopter is flying which makes it quite difficult to keep oriented and stay in control. I’ve even heard full-size helicopter pilots say that an RC helicopter is harder to fly – though in reality it’s probably not – but keeping orientated when you’re not facing the same way the helicopter is can be extremely difficult to master.
How Do RC Helicopters Fly?
So, how does an RC helicopter fly? Someone once said that it beats the air into submission – and in fact, it kind of does.
RC helicopter flight can be broken into 5 basic components and their functions. The main rotor, tail rotor, swashplate assembly, collective control, and cyclic control.
The Main Rotor
A conventional RC helicopter has its main rotor above the fuselage (its body) which consists of 2 or more rotor blades extending out from a central rotor head, or hub assembly.
The main rotor of an RC helicopter is what produces the lifting force that allows the RC helicopter to fly. The rotors on a collective pitch RC helicopter are shaped just like the airfoils of an airplane wing, only they are thinner, narrower and both sides are symmetrical.
As the rotor blades rotate through the air, they generate lift. The amount of lift generated is determined by the pitch angle (and speed) of each rotor blade as it moves through the air. The pitch angle is referred to as the angle of attack when the rotors are in motion.
Some cheaper RC helicopter models which use fixed-pitch rotors, generate lift by speeding up or slowing down the motor and therefore the speed of the main rotors. This results in much slower responsiveness of the heli, since it takes some for the motor speed to speed up or slow down. As far as I know, there aren’t any real RC helicopters which use fixed-pitch available on the market anymore and don’t go picking one up at a garage sale – there’s a reason they’re no longer made.
Depending on how the RC helicopter is set up, the main rotors typically spin at a constant head speed ranging anywhere from 1,500 RPM to 3,000RPM. Larger size .60 or .90 RC helicopters will usually have a head speed of 1,500RPM to 2,000RPM where smaller .30 or .50 size heli’s might have a head speed in the 2,000RPM to 3,000RPM range.
To increase thrust, or lifting power, you simply need to increase the pitch of the main rotor. On an RC helicopter, the angle of attack (pitch) can be anywhere from +15 degrees to -15 degrees, though most RC heli’s are somewhere in the +11 to -11 range.
The pitch angles of the blades are controlled by the collective and the cyclic control which are transferred to the main rotors through the swashplate.
The Tail Rotor
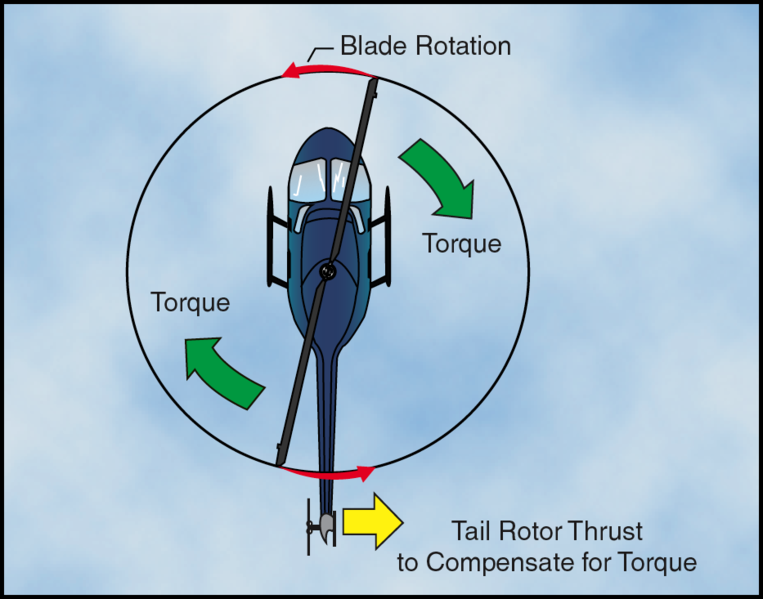
Since Newton’s law states that “For every force, there is an equal and opposite reaction force,” as soon as the RC helicopter leaves the ground, there is nothing to keep the helicopter from spinning in an opposite direction to the torque force generated main rotors.
To stop the spinning of the body, a force that counteracts the force of the main rotors needs to be applied to stop it. In a single rotor RC helicopter, this is usually done by a smaller set of rotors attached to a long tail boom called the tail rotor, which is used to control the yaw, or rotation, of the helicopter.
The amount of thrust the tail rotor produces is determined by their angle of attack.
Increasing the angle of attack (pitch) of the tail rotor blade will increase the thrust, which will push the helicopter in the same direction as the main rotor blades, while decreasing the pitch decreases the amount of thrust, allowing the natural torque force of the main rotors to take over letting the helicopter rotate in the opposite direction to the main rotors.
A gyro, either mechanical or piezo-electric, measures the difference in rotational force between the helicopter and tail rotor and adjusts the pitch of the tail rotor accordingly to hold the RC heli steady.
The tail rotor is typically mounted at a 90-degree angle from the main rotor and provides a sideways thrust which counteracts the rotational force applied by the main rotor to hold it straight.
Depending on the gearing ratios, the tail rotor typically turns 3 – 6 times faster than the main rotor.
Tail rotors in RC helicopters are typically driven by a belt or a torque tube that is powered off the main gear which also powers the main rotor. In some cheaper models, a separate motor is used to power the tail.
The Swash Plate Assembly
The swash place on an RC (or full size) helicopter is used to translate the pilot’s commands into the motion of the main rotor blades and/or flybar.
The swashplate assembly fits on to the main rotor shaft beneath the head of the heli and consists of one rotating and one non-rotating disc.
The lower, non-rotating disc is linked directly to the cyclic and collective controls which are controlled by servos under the command of the pilot’s transmitter inputs.
This non-rotating disc is attached by a bearing to the second rotating disc, which turns with rotor and is linked to the main rotor blade pitch horns.
The swashplate can be made to tilt in any direction according to the cyclic controls or move up and down to change the pitch of the rotors under the collective control, which allows the pilot to control the RC helicopter in a 3-dimensional space.
Collective Control
The collective control raises the entire swash plate assembly as a unit. As the swash plate rises or falls, it changes the pitch (angle of attack) of all rotor blades simultaneously and to the same degree. This is known as collective control.
Therefore, when the collective control is increased, it will raise the entire swash plate assembly increasing the angle of attack. Increasing the angle of attack increases the lift of the main rotor, causing the heli to gain altitude while decreasing the angle of attack decreases the lift.
Since all blades are changing pitch together, the change in lift remains constant throughout every full turn of the blades.
Cyclic Control
The cyclic control works by tilting the swashplate up or down and increasing the pitch angle of a rotor blade individually as they revolve, so the angle of attack on one side of the helicopter is greater than it is on the other.
As the pitch angle changes, the lift generated by each blade changes and this unbalanced lift causes the helicopter to tip towards whichever side is experiencing the least amount of lift.
This allows the helicopter to move in any direction around a 360-degree circle, including forwards, backward, left and right or any combination of the 4.
For example, when the cyclic control is pushed forwards on your radio transmitter, the swashplate tilts forwards increasing the angle of attack (and lift) in the rear of your helicopter which causes it to move forwards.
Because of the cyclic and collective pitch control of the main rotor blades and the pitch control of the tail rotor, your engine RPM and therefore the speed of the main rotor blades can be kept at a constant rate increasing maneuverability response time.
Your radio transmitter handles all the mixes and translations between cyclic and collective movement, so all you need to think about is which way you want your helicopter to fly, not angles of attack or swash plate tilting.
RC Helicopter Sizes
There are different sizes of helicopters. The size relates to the size of the engine in the helicopter. We’ll discuss these now:
30 size
These are the little helicopters. They’re nice and small which makes them cheap to buy and cheap to run. These are the recommended machines to start learning on because when you crash, they’re not too costly to repair. Having said that, they’ll do a all manner of aerobatics! Most people have a 30 or 46 for learning new stuff and simply cause they fun to bash round cause they’re so nimble and cheap to run.
46 size
46 size helicopters are a step up from 30 size. They’ve got more powerful engines in them. Many 30 size helicopters can accomodate a 46 size engine, helicopters like the JR Ergo and Thunder Tiger Raptor are often upgraded in this way. However, true 46 size helicopters are often slightly larger than their 30 size cousins. They often have slightly larger rotor blades as well.
50 size
In the last year or so, 50 size helicopters have become popular. Mainly due to the increase in good quality 50 size engines from makers such as OS. Like 30’s upgraded to 46’s, many 46’s will accomodate 50 size powerplants. Lately however, true 50 size helicopters such as the JR Voyager 50 and Xcell Fury 50 have started appearing on the market designed from the outset for 50 size engines.
60 size
These are the larger size helicopters. Until recently the engine size limit for competitions was 0.6 of a cubic inch which meant that was about as high as engine capacity went. Now that this limit has been revised, engine makers such as OS and YS have started bringing out much larger engines in the 80 and 90 size. Many people have started putting these power plants in their 60 size machines.
60 size machines are popular in competitions and for people doing lots of aerobatics. However, when you crash them, they cost more than the smaller machines to fix, so people often buy the 60’s once they are confident fliers. They have the brute horsepower needed for some of the aerobatics people do.
Gassers
Gassers are basically 60 size machines with petrol engines in them. The most popular petrol engine for helicopters is the Zenoah G23. Which is basically a chainsaw or weedeater engine. The benefits of these machines is that they cost so little to run in comparison to a glow helicopter. They’ll often run for about 30-40 mins on a tank of gas. However, they are a bit heavier than glow helis and don’t do aerobatics so well and they’re expensive to buy. Repairs cost about the same as a 60 size helicopter.
Final Words
When you’re first learning, I’d recommend getting probably a 46 size machine. The reason for this is when you deck them they’re not too expensive to fix and they’ve got a good amount of power which mean you’re less likely to get bored with it once you advance into aerobatics.
I myself have a gas powered machine, but I also have a 46 size for when I just want to go out and blast around the sky or try a new trick. I’m not as scared of decking the 46 as I am of the gasser.





{kind=link}